




銷售儀器儀表、閥門、電氣、電線電纜、機電產品、船舶設備、自動化控制系統集成、成套設備及領域內技術開發、技術轉讓、技術咨詢、技術服務,從事貨物及技術的進出口業務,儀器儀表、閥門、電線電纜的生產、加工。
進口日本不二越NACHI動作自如的7軸機器人
動作自如的7軸“手腕”機器人
采用可進行更加復雜動作的7軸結構
通過7軸化,使到目前為止6軸結構無法實現的在狹小空間以及有障礙物場所的機器人的應用成為可能。 根據手腕部可搬運重量的不同,備有MR35(可搬運重量35kg),MR50(可搬重量50kg)2種類型。 可供選擇的有吊掛式,壁掛式,傾斜式設置方式。 內置型的有用于伺服電動機驅動的工具接線(用于2軸),因不與周邊設備發生干涉,布局方便。
高環境適應性
作為標準,機器人的主機,手腕部的防塵防滴規格均相當于IP67,在嚴酷的工作環境下也可以使用。
以往的機器人
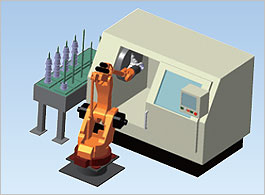
機器人占據了設備的正面
MR 系列7軸機器人
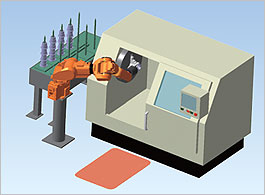
7軸結構的柔性動作
機器人設置在設備的側面
進口日本不二越NACHI動作自如的7軸機器人
MR35?MR50的工作范圍
緊湊的設置空間 廣闊的工作范圍
- 與此前同等可搬能力的機型相比,整體幅面縮減了30%,構架干涉半徑縮減了40%。另一方面,前后行程擴大了20%,飛躍性的提高了設置機器人時的布局自由度。

(*1) 本產品的額定功率,規格,外部尺寸等如需改良而變更,恕不另行通告。
(*2) 如果本產品的后使用者與軍事相關,或用于兵器等的制造,可能成為“外匯及貿易法”規定的出口限制的對象。出口時,請進行充分的審查和辦理所需的出口手續。
規格(型號)
MR35?MR50的規格
| 型號 | MR35-01 | MR50-01 | |
|---|---|---|---|
| 結構 | 關節型 | ||
| 自由度 | 7 | ||
| 驅動方式 | AC伺服方式 | ||
大 工 作 范 圍 | J1 | ±2.88rad (±165°) | |
| J2 | +2.53~-0.52rad (+145~-30°) | ||
| J3 | +2.44~-2.55rad (+140~-146°) | ||
| J4 | ±6.28rad (±360°) | ||
| J5 | ±2.18rad (±125°) | ||
| J6 | ±7.84rad (±450°) | ||
| J7 | ±3.32rad (±190°) | ||
大 速 度 | J1 | 3.14rad/s (180°/s) | 3.05rad/s (175°/s) |
| J2 | 3.05rad/s (175°/s) | 2.44rad/s (140°/s) | |
| J3 | 3.14rad/s (180°/s) | 2.88rad/s (165°/s) | |
| J4 | 5.32rad/s (305°/s) | 4.45rad/s (255°/s) | |
| J5 | 5.32rad/s (305°/s) | 4.45rad/s (255°/s) | |
| J6 | 7.33rad/s (420°/s) | 6.46rad/s (370°/s) | |
| J7 | 2.27rad/s (130°/s) | ||
| 可搬重量 | 腕部 | 35kg | 50kg |
| 上臂部 | 15kg | ||
| 手腕容許靜載荷扭矩 | J4 | 160N?m | 210N?m |
| J5 | 160N?m | 210N?m | |
| J6 | 90N?m | 130N?m | |
| 手腕容許大慣性力矩*1 | J4 | 16kg?m2 | 30kg?m2 |
| J5 | 16kg?m2 | 30kg?m2 | |
| J6 | 5kg?m2 | 12kg?m2 | |
| 位置重復精度*2 | ±.07mm | ||
| 高使用空氣壓力 | 0.49MPa (5.0kgf/cm2)以下 | ||
| 周圍溫度 | 0~45°C | ||
| 設置條件 | 落地式 | ||
| 耐環境性*3 | 主機部 | 等同于IP67(防塵防滴) | |
| 腕部 | 等同于IP67(防塵防滴) | ||
| 主機重量 | 745kg | ||
(*1) 手腕容許zui大慣性力矩根據手腕負荷條件的不同而不同,敬請注意。
(*2) 也有吊掛式,壁掛式,傾斜設置可供選擇。
(*3) 因有機溶劑,酸,堿,以及氯類與汽油類切削液等對密封材料有損害,禁止使用。


 采購中心
采購中心
 化工儀器網
化工儀器網